
Page 18 - 南京医科大学自然版
P. 18
第45卷第12期
·1700 · 南 京 医 科 大 学 学 报 2025年12月
A 射变换和非仿射变换两部分组成,基于物理模型中
Import“fixed”and
的薄板形变原理,通过最小化薄板的弯曲能量实现
“moving”data
数据间的变形匹配;拉普拉斯变形(Laplace deforma⁃
tion) :通过调整数据的微分坐标实现数据的变形
[9]
Mark or extract corresponding 效果,数据变形的同时仍保持局部细节特征;此外
landmark pairs between datasets
还有基于变形图、基于网格等的变换模型 [10] 。采用
不同密集点对应关系的计算方式,结合不同的坐标
Based on landmark pairs, 变换模型,并进行不同的目标函数约束,都可实现
compute the spatial “非刚性配准”效果。
transformation matrix using
centroid alignment,singuar
value decomposition,and related 2 “刚性配准”在口腔医学中的应用
techniques
“刚性配准”在口腔医学领域中已有广泛应用,
是目前处理和分析口腔医学三维点云数据的主要
Apply the spatial transformation 技术手段。“刚性配准”在三维点云数据的对比分
matrix to the“moving”data and
output the result
Import“fixed”and
B “moving”data
Import“fixed”and
“moving”data
Perform alignment or coarse
registration between the“fixed”
Compute the dense point and“moving”data
correspondences between
datasets and the sum of squared
distances between corresponding
points Compute the dense point
correspondences between
datasets and the sum of squared
distances between corresponding
points
Sum of No
distances >
threshold
Yes Sum of No
distances >
threshold
Compute the spatial
tranformation matrix and apply
Yes
it to the“moving”data
Compute the spatial
transformation matrix for each
vertex on the“moving”data and
No Reached apply it to the“moving”data
maximum
iterations?
Yes No Reached
maximum
iterations?
Output the transformed
“moving”data
Yes
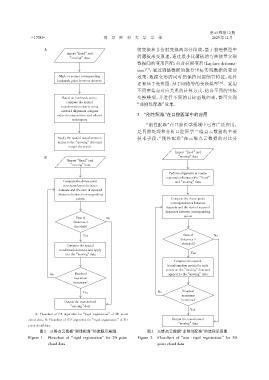
A:Flowchart of PA algorithm for“rigid registration”of 3D point
cloud data. B:Flowchart of ICP algorithm for“rigid registration”of 3D Output the transformed
“moving”data
point cloud data.
图1 三维点云数据“刚性配准”的流程示意图 图2 三维点云数据“非刚性配准”的流程示意图
Figure 1 Flowchart of“rigid registration”for 3D point Figure 2 Flowchart of“non ⁃ rigid registration”for 3D
cloud data point cloud data